Timing analysis and simulation of multiple ECUs
Summary
For today’s advanced driver assistance systems (ADAS), about 50 time-critical event chains have to be jointly optimized to meet all real-time requirements, all across the system, from sensor to actuator, including embedded control units (ECUs), gateway ECUs, buses, hypervisors, and operating systems.
When it comes to fully autonomous driving, well above 1000 time-critical event chains have to be jointly optimized. This is not something that could be done manually anymore. This is where the INCHRON chronSUITE comes in handy, with model-based simulation and trace-based analysis & test.
Mastering the Real-Time Challenge
Automotive embedded systems for autonomous driving demand the highest degree of performance, reliability and safety in long-term operation. At the same time, the development of these very complex systems is also subject to budget limitations and aggressive delivery schedules. INCHRON, iSYSTEM, OpenSynergy and Renesas jointly demonstrate how to master the challenge of embedded real-time systems design for autonomous driving.
Visualizing, Analyzing and Optimizing the Dynamic Behavior
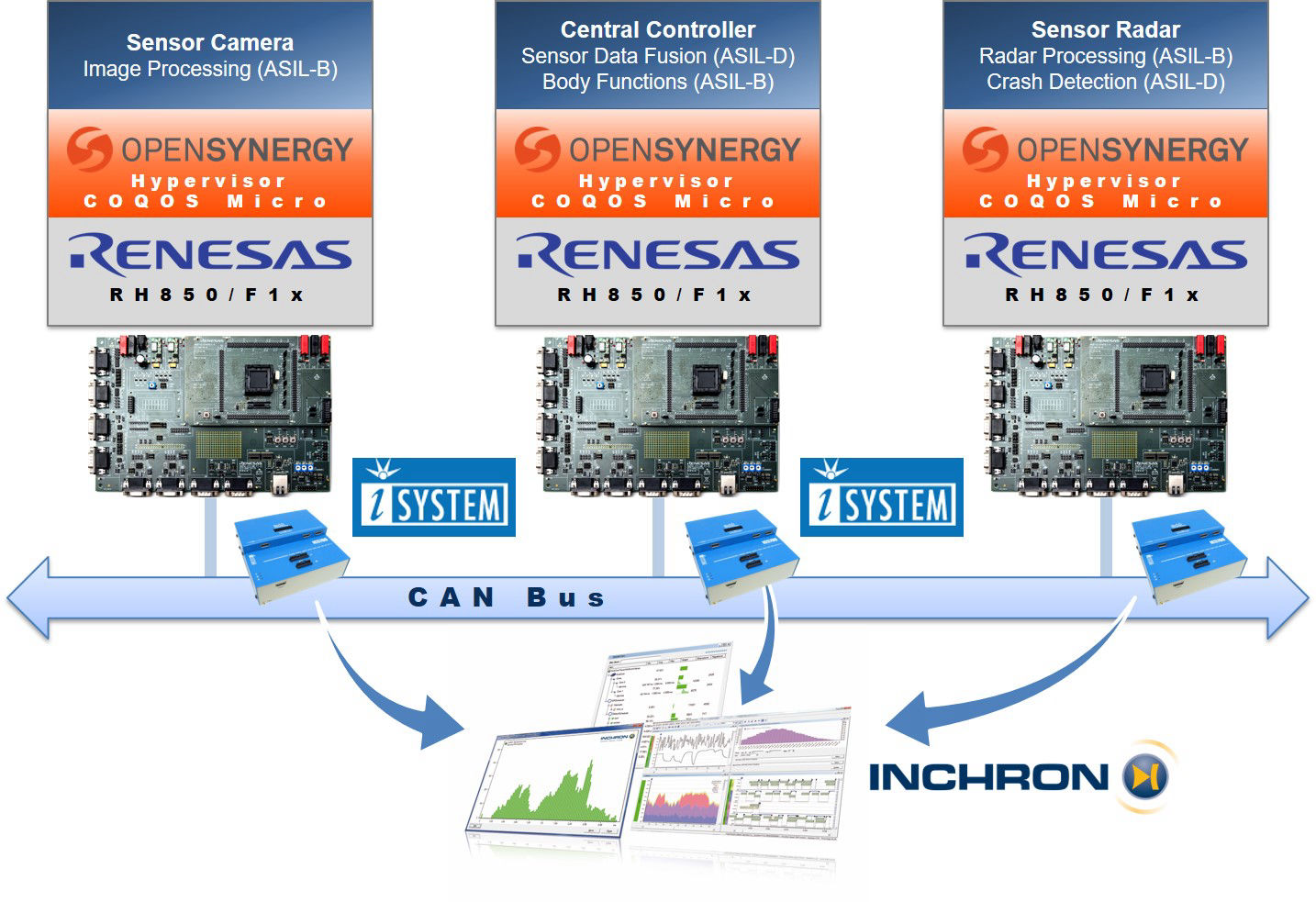
The demo system comprises three ECUs connected to a common CAN bus. Each ECU is represented by a printed circuit board equipped with Renesas RH850/F1x series of micro-controllers each running an OpenSynergy COQOS micro hypervisor with virtual machines and various applications on top. Applications of different ASIL levels are running on the same CPU thanks to the hypervisor.
All essential timing information about the behavior of the hypervisor, virtual machines, applications, and event chains in this system are captured and recorded by iSYSTEM’s iC5700 On-Chip Analyser. Furthermore, the CAN/LIN bus add-on module for iC5700 is used to record trace logs of the communication on the CAN bus.
The INCHRON chronSUITE analyzes the information recorded by the iSYSTEM tools, with all CPU and CAN bus traces visualized against a common time base. One can use it to identify event chains, to calculate statistics of run time values and other timing parameters, as well as to check compliance with predefined timing requirements. The data so obtained can be used to feed a model of the entire system with realistic values into the chronSUITE simulation environment. Finally, such a model can be utilized for the optimization of the system and its timing parameters, as well as for cost-effective and automated verification of changes in the system.